服务器可以做几个网站吗2024年重启核酸
| 项目名称 | 实验七 ROS[Kinetic/Melodic/Noetic]外设 | 成绩 | |
| 内容:使用游戏手柄、使用RGBD传感器,ROS[Kinetic/Melodic/Noetic]摄像头驱动、ROS[Kinetic/Melodic/Noetic]与OpenCV库、标定摄像头、视觉里程计,点云库、可视化点云、滤波和缩减采样、配准与匹配、点云分区 | |||
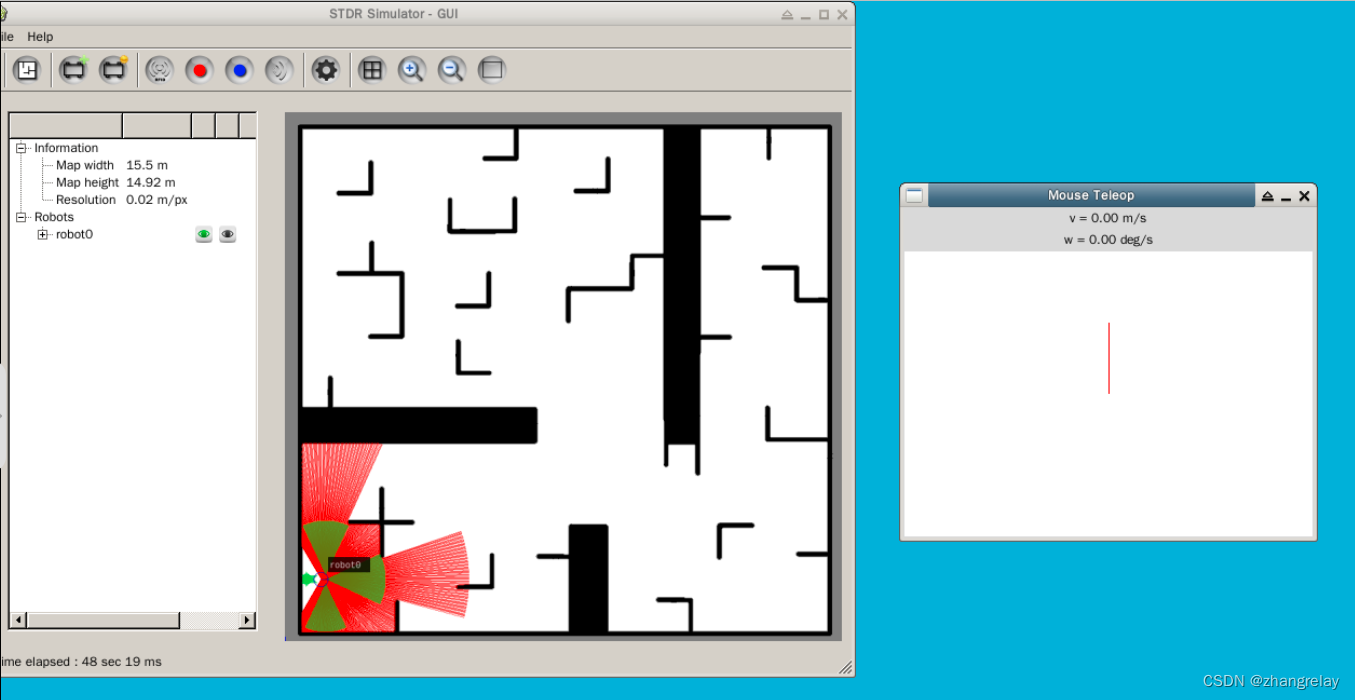
| 实验记录(70分) 安装ROS中的鼠标驱动和遥控功能包 sudo apt install ros-kinetic-mouse-teleop 添加鼠标遥控的相关软件库。 rosrun mouse_teleop mouse_teleop.py 使用默认功能包:
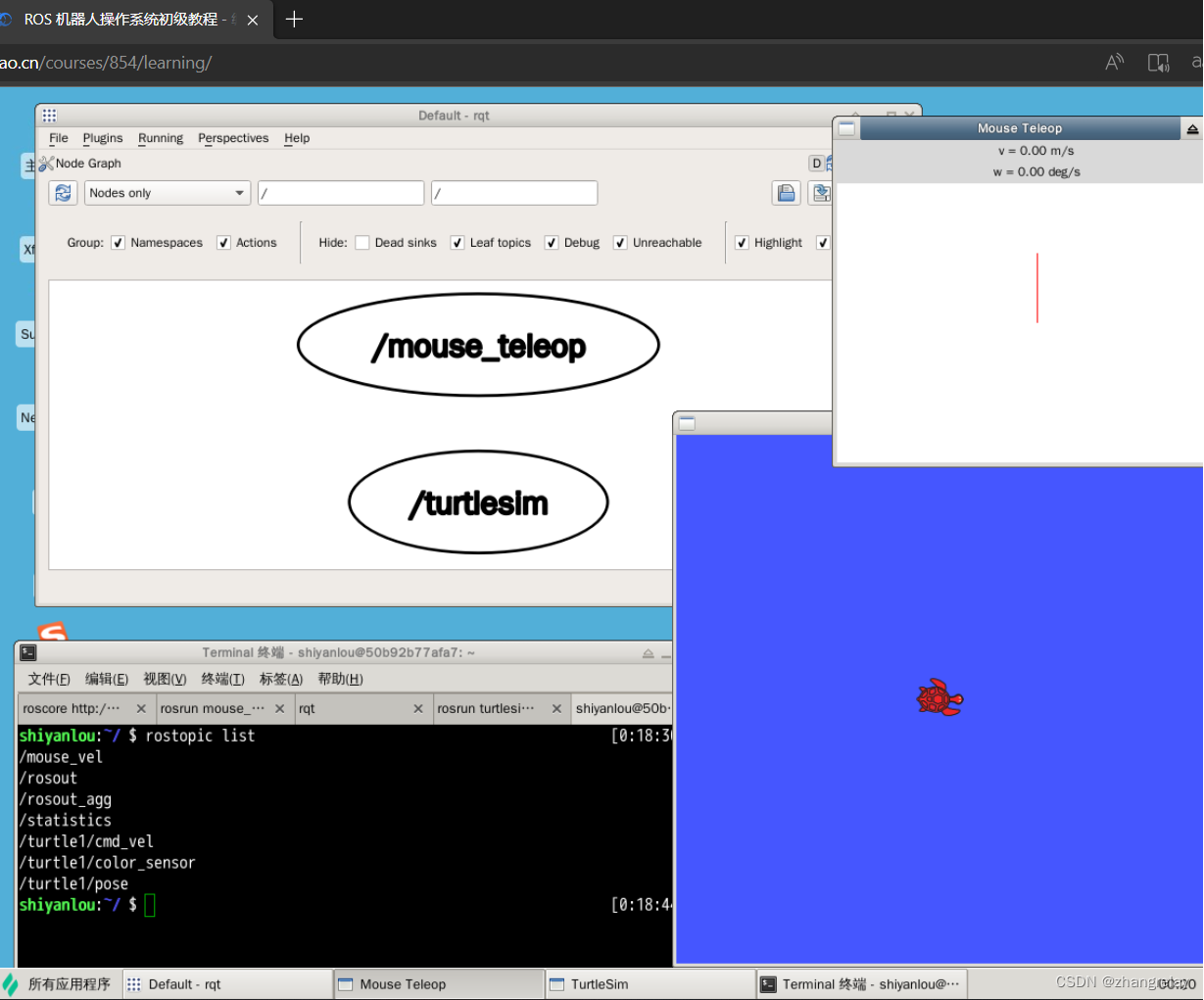
查看使用的节点(鼠标遥控): 打开小乌龟的窗口: 发现问题,二者没有联系:
使用rostopic list发现,二者之间没有建立通信联系:
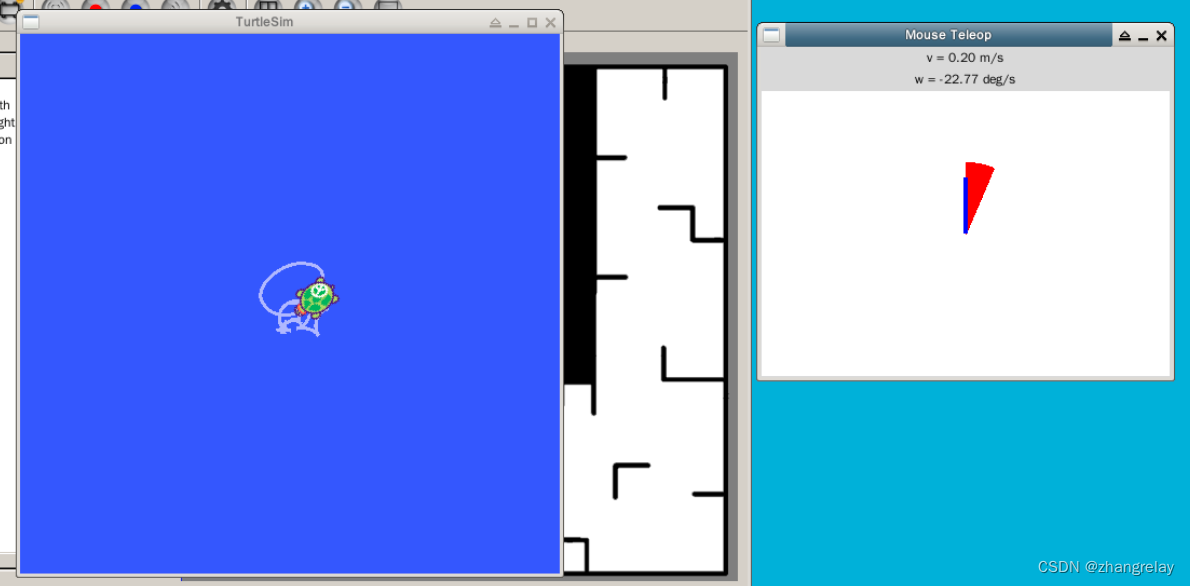
rosrun mouse_teleop mouse_teleop.py mouse_vel:=turtle1/cmd_vel 重命名一下,建立二者联系:
就可以进行遥控:
| |||
| 思考题(30分): 使用游戏手柄控制Turtlesim小乌龟: 相关包的安装 硬件设别 察看和解析硬件数据 看Topic类型 看消息具体数据 分析小乌龟需要什么数据 运行小乌龟: $rosrun turtlesim turtlesim_node 察看Node,小乌龟Node是/turtlesim $rosnode list /rosout /turtlesim 察看此node具体信息 察看Topic Type 当前需要一个Node,它接收/joy Topic,把其中的数据转换,发送/turtle1/cmd_vel,就可以把手柄数据和小乌龟所需数据连接起来了。 | |||


AI:
蓝桥云课ROS机器人旧版实验报告-07外设大纲可能包括以下内容:
- 介绍外设的概念、分类和功能,以及它们在机器人系统中的作用和重要性。
- 列举常见的机器人外设,例如传感器、执行器、控制器等,并简要介绍它们的功能和特点。
- 介绍如何与外设进行通信和交互,包括串口通信、蓝牙通信、Wi-Fi通信等。
- 演示如何通过ROS与外设进行通信和交互,包括创建ROS节点、发布和订阅话题、使用服务调用等。
- 介绍外设的驱动程序和接口,例如Linux系统下的设备文件接口、Windows系统下的驱动程序等。
- 演示如何编写ROS驱动程序,与外设进行通信和交互,实现对外设的控制和数据采集。
- 介绍机器人与外设的交互方式,例如手动控制、自动控制、远程控制等。
- 演示如何通过ROS实现对外设的远程控制和数据采集,例如控制机器人的移动、采集传感器数据等。
以上是蓝桥云课ROS机器人旧版实验报告-07外设大纲的可能内容,具体内容根据实验的目的和要求可能会有所不同。在实验过程中,需要仔细阅读相关的文档和教程,了解更多外设的种类、功能和交互方式,以及如何通过ROS与外设进行通信和交互。
蓝桥云课ROS机器人旧版实验报告-07外设进阶实验可能包括以下内容:
- 深入了解外设的接口和协议,例如串口通信协议、蓝牙协议、Wi-Fi协议等。
- 演示如何通过编程语言和库,例如Python、C++等,与外设进行通信和交互。
- 介绍外设的驱动程序和API,例如Linux系统下的设备文件接口API、Windows系统下的驱动程序API等。
- 演示如何编写ROS驱动程序,与外设进行通信和交互,实现对外设的控制和数据采集。
- 介绍机器人与外设的交互方式,例如手动控制、自动控制、远程控制等。
- 演示如何通过ROS实现对外设的远程控制和数据采集,例如控制机器人的移动、采集传感器数据等。
- 介绍外设的拓展和升级,例如增加传感器、更换控制器等。
以上是蓝桥云课ROS机器人旧版实验报告-07外设进阶实验的可能内容,具体内容根据实验的目的和要求可能会有所不同。在实验过程中,需要仔细阅读相关文档和教程,了解更多外设的种类、功能和交互方式,以及如何通过ROS与外设进行通信和交互。同时,需要掌握编程语言和库的使用,实现对外设的控制和数据采集。
蓝桥云课ROS机器人旧版实验报告-07外设注意事项可能包括以下内容:
- 安全问题:在使用外设时,需要注意安全问题,例如避免短路、过流、过压等危险情况。
- 硬件兼容性:选择外设时,需要注意与机器人的硬件兼容性,例如接口类型、通信协议等。
- 软件兼容性:选择外设时,需要注意与机器人的软件兼容性,例如ROS版本、驱动程序等。
- 数据格式:与外设进行通信和交互时,需要注意数据格式的正确性,例如数据类型、字节序、协议等。
- 通信稳定性:与外设进行通信和交互时,需要注意通信的稳定性,例如避免信号干扰、数据丢失等问题。
- 驱动程序安装:安装外设的驱动程序时,需要注意操作系统的类型和版本,以及驱动程序的兼容性。
- 数据安全:在使用外设进行数据采集和控制时,需要注意数据的安全性,例如数据加密、权限设置等。
以上是蓝桥云课ROS机器人旧版实验报告-07外设注意事项的可能内容,具体内容根据实验的环境和要求可能会有所不同。在实验过程中,需要仔细阅读外设的文档和教程,了解更多外设的使用方法和注意事项,确保实验的顺利进行。
蓝桥云课ROS机器人旧版实验报告-07外设核心要点总结可能包括以下内容:
- 外设是机器人系统中重要的组成部分,可以扩展机器人的功能和能力。
2.常见的机器人外设包括传感器、执行器、控制器等,需要了解它们的功能和特点。 - 与外设进行通信和交互需要了解通信协议和接口,例如串口通信协议、蓝牙协议、Wi-Fi协议等。
- ROS提供了一种统一的的外设交互方式,可以通过ROS节点、话题、服务等方式与外设进行通信和交互。
- 外设的驱动程序和接口是实现外设与机器人系统无缝集成的重要部分,需要了解和掌握。
- 通过编写ROS驱动程序,可以更好地实现对外设的控制和数据采集,提高机器人的智能和灵活性。
- 机器人与外设的交互方式包括手动控制、自动控制、远程控制等,需要根据具体应用场景选择合适的的方式。
以上是蓝桥云课ROS机器人旧版实验报告-07外设核心要点总结的可能内容,具体内容根据实验的环境和要求可能会有所不同。在实验过程中,需要仔细阅读外设的文档和教程,了解更多外设的种类、功能和交互方式,以及如何通过ROS与外设进行通信和交互。同时,需要掌握编程语言和库的使用,实现对外设的控制和数据采集。
python
#!/usr/bin/env python | |
import rospy | |
from std_msgs.msg import String | |
def callback(data): | |
# 在这里处理鼠标事件 | |
rospy.loginfo(rospy.get_caller_id() + "Received mouse button %s", data.data) | |
def listener(): | |
rospy.init_node('mouse_listener', anonymous=True) | |
rospy.Subscriber("mouse/click", String, callback) | |
rospy.spin() | |
if __name__ == '__main__': | |
listener() |
这个示例代码创建了一个ROS节点,订阅了名为“mouse/click”的ROS话题,并在回调函数中处理鼠标事件。在这个示例中,回调函数只是简单地记录了接收到的鼠标按钮事件。你可以根据自己的需要修改回调函数来执行其他操作,例如控制机器人的移动或执行其他任务。
要使用此代码,请将其保存到一个名为“mouse_listener.py”的文件中,并将其放置在1云课ROS机器人的工作目录中。然后,使用以下命令启动ROS节点:
bash
rosrun mouse_listener mouse_listener.py |
然后,你可以使用一个ROS驱动程序(例如Gazebo)模拟机器人,并在模拟器中模拟鼠标事件。例如,可以使用以下命令向“mouse/click”话题发送一个字符串消息:
bash
rosrun rqt_console rqt_console |
在rqt_console中,可以输入以下命令来发布一个字符串消息:
rostopic pub mouse/click std_msgs/String "data: 'button1'" |
这将在“mouse/click”话题上发布一个字符串消息,其中包含“button1”。在运行“mouse_listener”节点的同时,你可以在另一个终端中运行此命令来模拟鼠标事件。